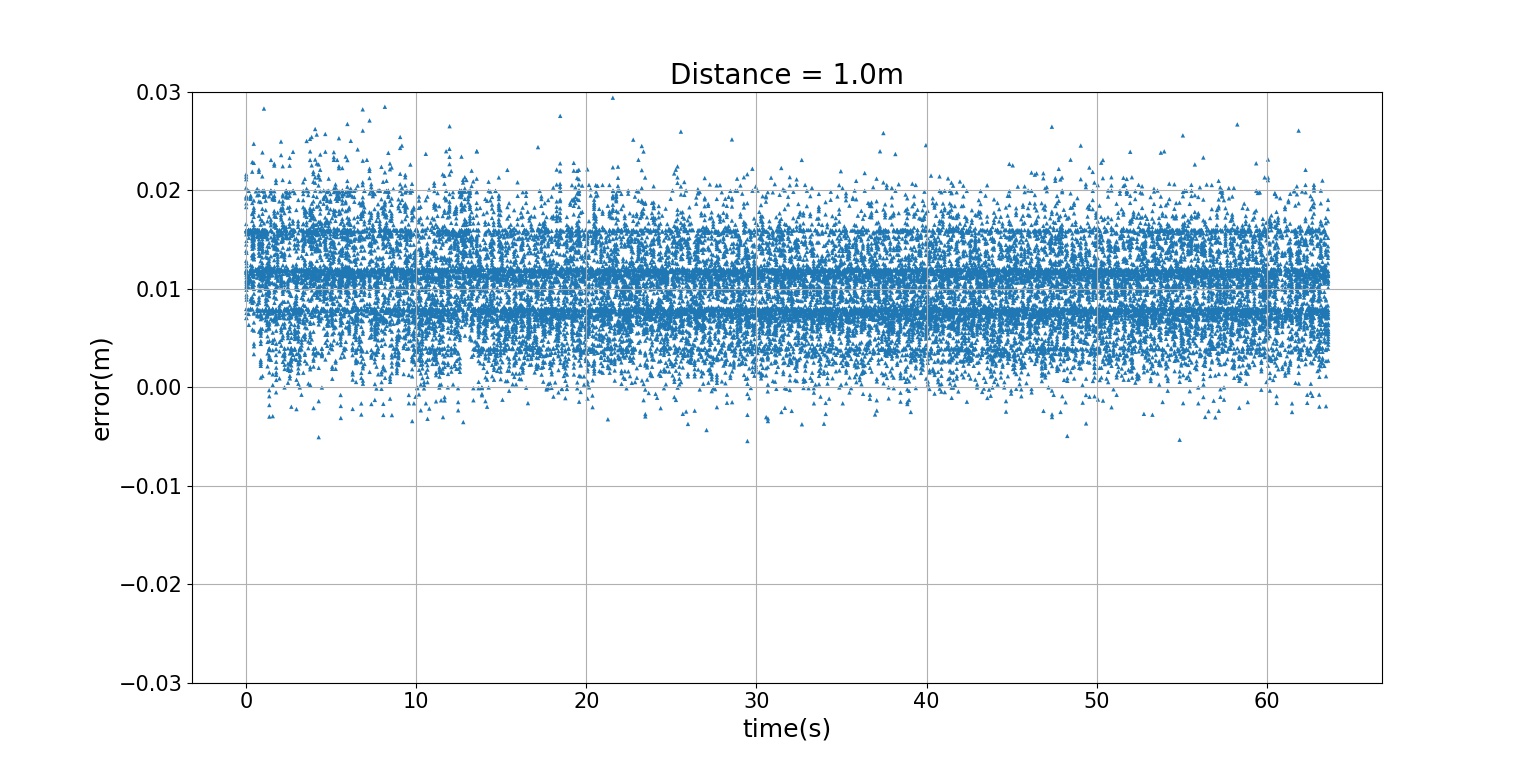
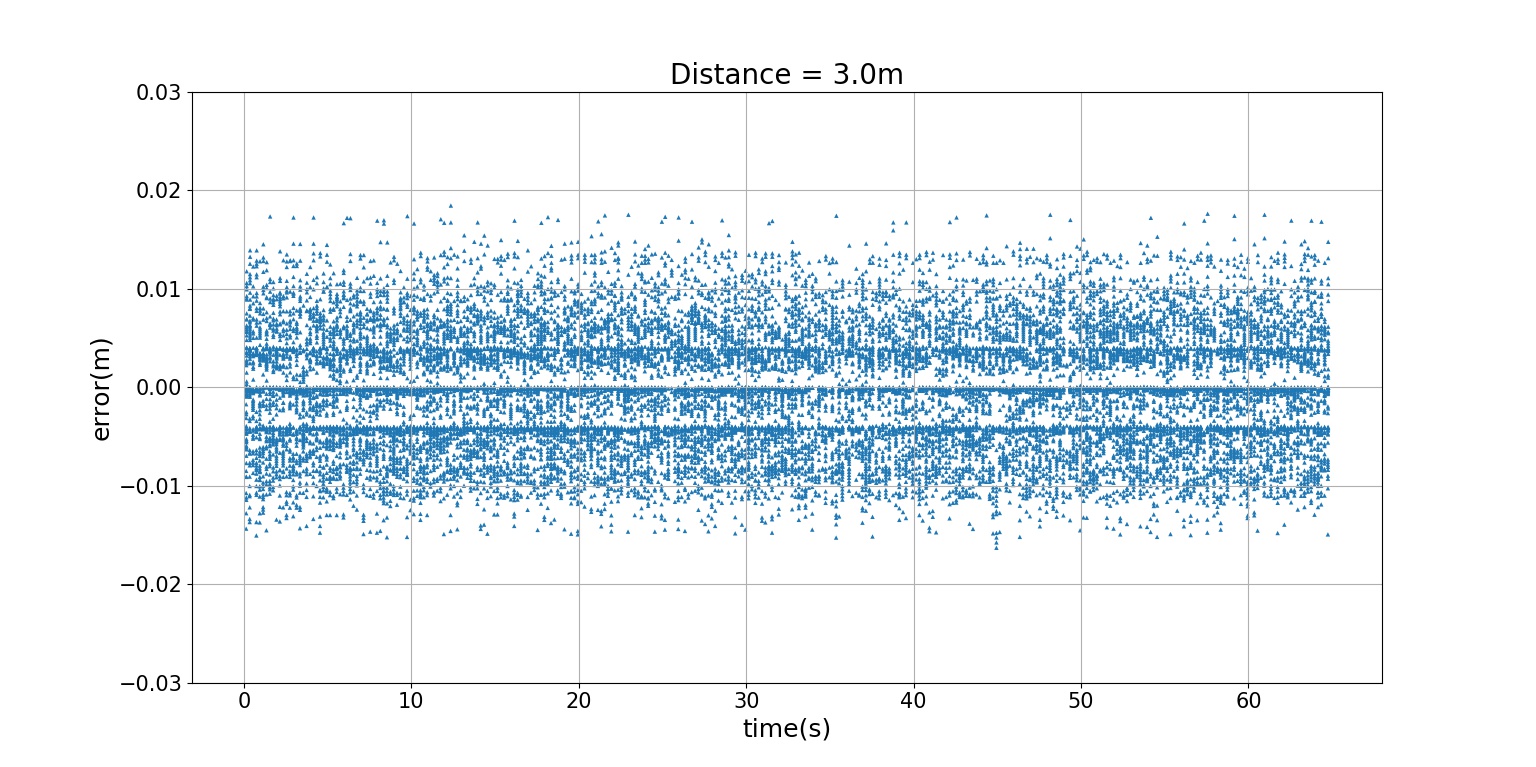
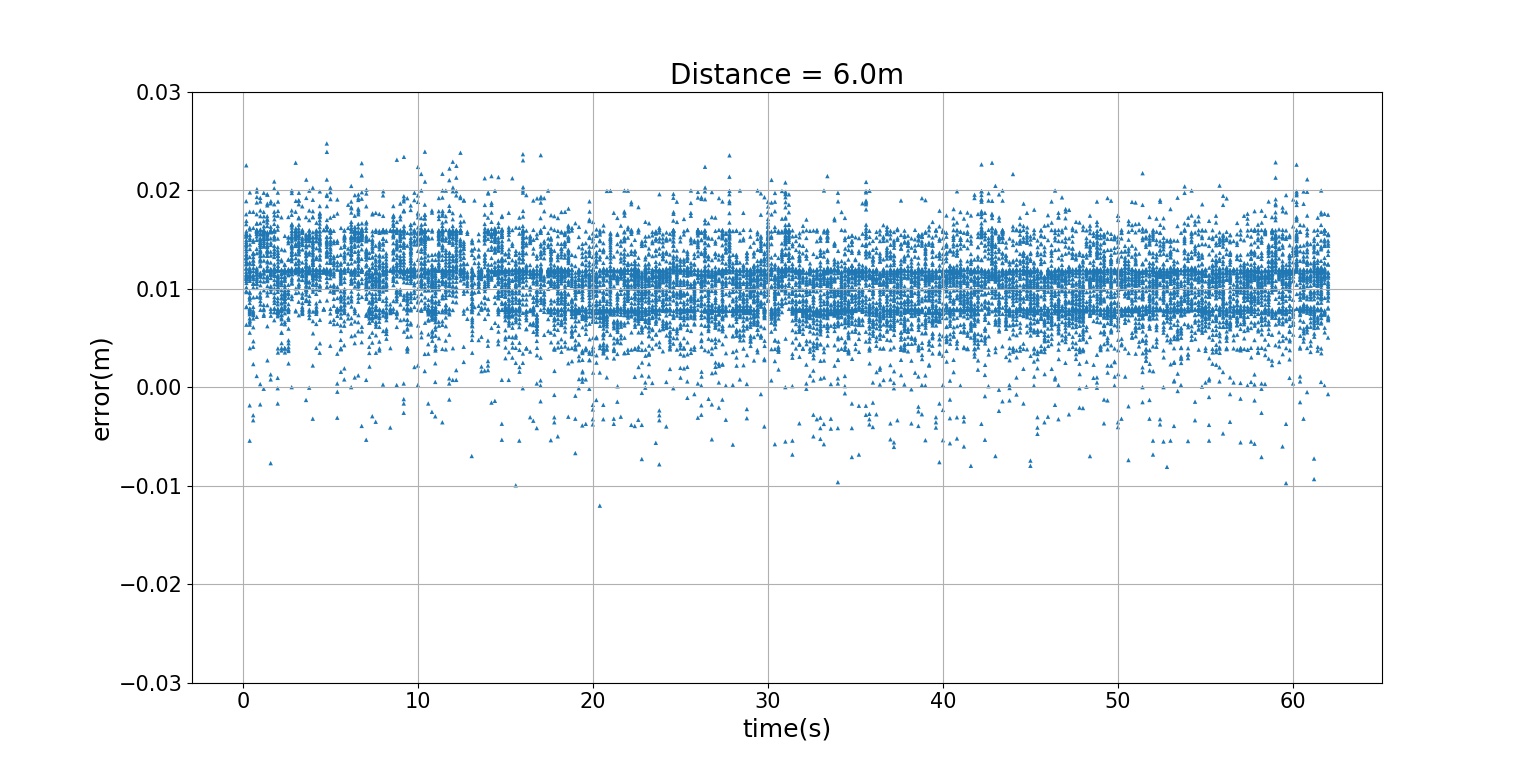
Velodyne VLP-32C激光雷达通信及数据解析 Posted on 2018-10-08 | In Notes Words count in article: 1,345 写了一段小程序用来进行简单环境下的VLP-32C激光雷达距离精度测试, 部分结果: –> Velodyne VLP-32C Lidar user manual、测试环境与方法 demo 代码: 123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960616263646566676869707172737475767778798081828384858687888990919293949596979899100101102103104105106107108109110111112113114115116117118119120121122123124125126127128129130131132133134135136137138139140141142143144145146147148149150151152153154155156157158159160161162163164165166"""Velodyne VLP-32C激光雷达通信及数据解析程序主要用来测试雷达的距离精度author: 云水心@2018.10"""import socketimport mathimport timeimport sysfrom time import sleep# UDP通信s = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)s.bind(('', 2368))s.connect(('192.168.1.201', 2368))# 传感器信息marker = b'\xffee'n_azimuth_bytes = 2n_channels = 32n_data_block_bytes = 100n_channel_data_bytes = 3n_data_blocks = 12pitch_deg = [-25.0, -1.0, -1.667, -15.639, -11.31, 0.0, -0.667, -8.843, -7.254, 0.333, -0.333, -6.148, -5.333, 1.333, 0.667, -4.0, -4.667, 1.667, 1.0, -3.667, -3.333, 3.333, 2.333, -2.667, -3.0, 7.0, 4.667, 2.333, -2.0, 15.0, 10.333, -1.333]delta_deg = [1.4, -4.2, 1.4, -1.4, 1.4, -1.4, 4.2, -1.4, 1.4, -4.2, 1.4, -1.4, 4.2, -1.4, 4.2, -1.4, 1.4, -4.2, 1.4, -4.2, 4.2, -1.4, 1.4, -1.4, 1.4, -1.4, 1.4, -4.2, 4.2, -1.4, 1.4, -1.4]deg2rad = math.pi / 180.0rad2deg = 180.0 / math.pidist_meas = 4.0s_name = str(dist_meas) + '.csv' # 存储的文件名# 输入三字节数据,返回距离值def get_distance(data_per_channel): distance = (int(data_per_channel[1]) * 256 + int(data_per_channel[0])) * 4.0 / 1000.0 return distance# 输入channel值、距离值、航向角度,返回(x,y,z)def get_xyz(channel, dist, azimuth): """ x = dist * math.cos(pitch_deg[channel] * deg2rad) * math.sin((azimuth + delta_deg[channel]) * deg2rad) y = dist * math.cos(pitch_deg[channel] * deg2rad) * math.cos((azimuth + delta_deg[channel]) * deg2rad) z = dist * math.sin(pitch_deg[channel] * deg2rad) """ x = dist * math.cos(pitch_deg[channel] * deg2rad) * math.sin(azimuth * deg2rad) y = dist * math.cos(pitch_deg[channel] * deg2rad) * math.cos(azimuth * deg2rad) z = dist * math.sin(pitch_deg[channel] * deg2rad) return x, y, z# print(get_XYZ(21, 2.386, 0.16)) # (-0.051546641,2.381406307,0.138719708)# 输入两字节数据,返回角度值def get_azimuth(azimuth_data): angle = (int(azimuth_data[1]) * 256 + int(azimuth_data[0])) / 100.0 return angledef get_precision_azimuth(data_packet): # 传引用 i = 0 azimuth_gap = 0.0 for i in range(12): if i < 11: if data_packet[i + 1]['Azimuth'] < data_packet[i + 1]['Azimuth']: data_packet[i + 1]['Azimuth'] += 360 azimuth_gap = data_packet[i + 1]['Azimuth'] - data_packet[i]['Azimuth'] j = 0 while j < 32: data_packet[i]['channel %d' % (j)][0] = data_packet[i]['Azimuth'] + azimuth_gap * j * 2.304 / 55.296 + \ delta_deg[j] data_packet[i]['channel %d' % (j + 1)][0] = data_packet[i]['Azimuth'] + azimuth_gap * j * 2.304 / 55.296 + \ delta_deg[j + 1] if data_packet[i]['channel %d' % (j)][0] > 360: data_packet[i]['channel %d' % (j)][0] -= 360 elif data_packet[i]['channel %d' % (j)][0] < 0: data_packet[i]['channel %d' % (j)][0] += 360 if data_packet[i]['channel %d' % (j + 1)][0] > 360: data_packet[i]['channel %d' % (j + 1)][0] -= 360 elif data_packet[i]['channel %d' % (j + 1)][0] < 0: data_packet[i]['channel %d' % (j + 1)][0] += 360 j += 2# 每个data_packet包含12个data_block, data_block形式如下,每个channel包含azimuth和distance:"""data_block = {'Azimuth': .0, 'channel 0': [.0, .0], 'channel 1': [.0, .0], 'channel 2': [.0, .0], ' channel 3': [.0, .0], 'channel 4': [.0, .0], 'channel 5': [.0, .0], 'channel 6': [.0, .0], 'channel 7': [.0, .0], 'channel 8': [.0, .0], 'channel 9': [.0, .0], 'channel 10': [.0, .0], 'channel 11': [.0, .0], 'channel 12': [.0, .0], 'channel 13': [.0, .0], 'channel 14': [.0, .0], 'channel 15': [.0, .0], 'channel 16': [.0, .0], 'channel 17': [.0, .0], 'channel 18': [.0, .0], 'channel 19': [.0, .0], 'channel 20': [.0, .0], 'channel 21': [.0, .0], 'channel 22': [.0, .0], 'channel 23': [.0, .0], 'channel 24': [.0, .0], 'channel 25': [.0, .0], 'channel 26': [.0, .0], 'channel 27': [.0, .0], 'channel 28': [.0, .0], 'channel 29': [.0, .0], 'channel 30': [.0, .0], 'channel 31': [.0, .0]}"""# 返回data packetdef getinfo(recv_Data): data_packet = [] for i in range(n_data_blocks): data_block = dict() block_azimuth = get_azimuth( recv_Data[i * n_data_block_bytes + 2: i * n_data_block_bytes + 4]) # ffee标志位后的两字节为azimuth data_block.update({'Azimuth': block_azimuth}) for j in range(n_channels): s_t = 'channel ' + str(j) dist = get_distance(recv_Data[ i * n_data_block_bytes + 4 + j * n_channel_data_bytes: i * n_data_block_bytes + 7 + j * n_channel_data_bytes]) data_block.update({s_t: [block_azimuth, dist]}) # 此处尚未计及精确的azimuth data_packet.append(data_block) get_precision_azimuth(data_packet) return data_packetwith open(s_name, 'a') as f: f.write("time, Azimuth, channel 5 distance, channel5 X, channel5 Y, channel5 Z, error\n") f.close()time_start = time.clock()while True: recvData = s.recv(1248) # 接收udp数据 # print(recvData) li1 = [] d_p = getinfo(recvData) # 解析data_packet for i in range(12): # li = [d_p[i]['Azimuth']] t = d_p[i]['channel 5'][1] # 默认为channel 5距离 # 1-(-1), 5-(0), 9-(0.333),10-(-0.333), 18-(1), 考虑垂直放置误差,取用最短距离 """ if min(d_p[i]['channel 5'][1], d_p[i]['channel 9'][1], d_p[i]['channel 10'][1]) != 0: t = min(d_p[i]['channel 5'][1], d_p[i]['channel 9'][1], d_p[i]['channel 10'][1]) # t = (d_p[i]['channel 5'][1] + d_p[i]['channel 9'][1] + d_p[i]['channel 10'][1]) / 3 """ # li = [d_p[i]['channel 5'][0], d_p[i]['channel 5'][1]] # data_block的azimuth、channel5(0度俯仰角)的distance li = [d_p[i]['channel 5'][0], t] li1.append(li) # li1包含12个data_block的azimuth、channel5(0度俯仰角)的distance for i in range(12): # print("Azimuth:", li1[i][0], "Channel distance", li1[i][1:33]) if (li1[i][0] < 4.0 or li1[i][0] > 356.0) and li1[i][1] != .0: # 限定航向角度范围 with open(s_name, 'a') as f: time_elapse = time.clock() - time_start # 写入时间、角度、距离、X、Y、Z、error f.write("%f, %f, %f, %f, %f, %f, %f\n" % ( time_elapse, li1[i][0], li1[i][1], get_xyz(5, li1[i][1], li1[i][0])[0], get_xyz(5, li1[i][1], li1[i][0])[1], get_xyz(5, li1[i][1], li1[i][0])[2], get_xyz(5, li1[i][1], li1[i][0])[1] - dist_meas)) f.close() print(time_elapse, "Azimuth:", li1[i][0], "channel 5 distance", li1[i][1], "channel 5 XYZ", get_xyz(5, li1[i][1], li1[i][0])) # print("delta_Azimuth:%f" % (li1[11][0] - li1[10][0])) # 5hz:0.09、0.1、0.11, 10hz:0.18、0.19、0.2 !!!有跳动